






据外媒New Atlas报道,虽然机器人手术设备确实可以使手术更精确、侵入性更小,但它们仍然必须由外科医生持续操作。然而,最近,一个机器人导管成功地在猪体内自主导航,并帮助医生修复人工心脏瓣膜的渗漏处。
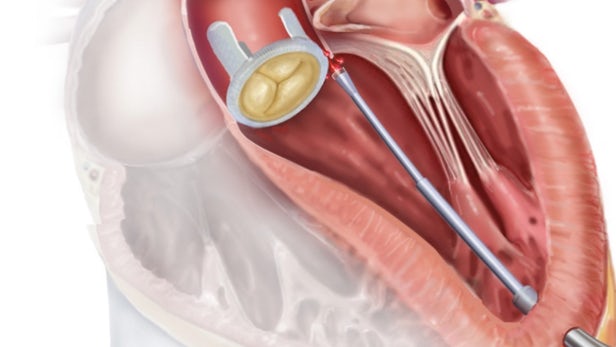
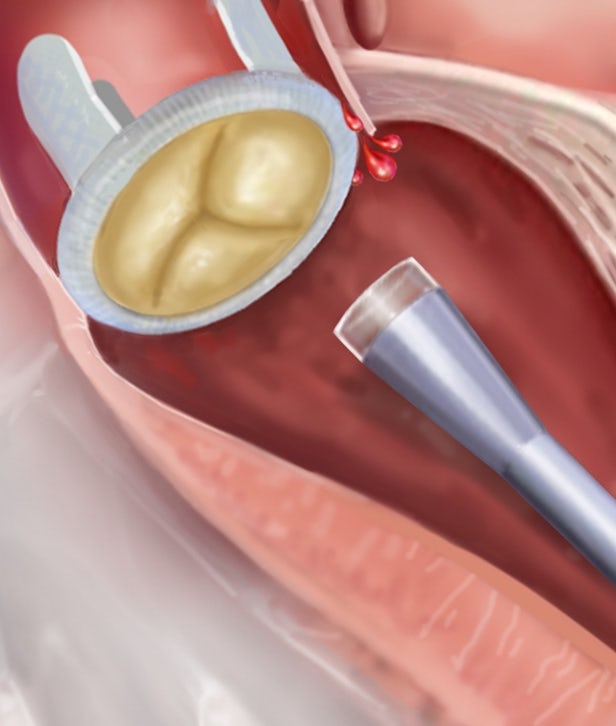
该设备由哈佛大学附属波士顿儿童医院的一个团队开发,该团队由儿科心脏生物工程主任Pierre Dupont博士领导。在细长工具的前端是一个光学触摸传感器 - 其包含一个LED聚光灯和一个内窥镜摄像头。
当外部马达沿着心脏左心室的内壁向前推动导管时,来自其摄像头的图像由基于人工智能的控制系统处理。该系统又能够确定传感器是否与血液、心脏壁或心脏瓣膜接触。另外,通过评估传感器施加在周围组织上的压力,系统能够防止其压力过大而造成损坏。
根据心脏解剖图和个体猪心脏的术前扫描图,控制系统继续确定器械在器官内的位置,以及如何进行以达到其目标。该目标是主动脉中的人工瓣膜,其渗漏处需要修复。一旦导管到达该瓣膜,外科医生就接管,远程操作导管末端的手术工具以堵塞渗漏处。
在迄今为止进行的试验中,机器人导管比手动操纵杆控制的装置需要稍长的时间才能到达瓣膜。然而,随着技术的进一步发展,这应该会改变。
最终,研究人员希望该系统可以让外科医生更加专注于最重要的手术过程。此外,全球运营的多个系统可能可以在线汇集并分享知识,从而提升其表现。
Dupont表示:“这将会提升竞争力。世界上每一位临床医生都将在与其所在领域相媲美的技能和经验水平上运作。这一直是医疗机器人的承诺。自主可能是让我们在那里的原因。”
研究人员最近在《科学⋅机器人学》杂志上发表了一篇关于该研究的论文。











